Article en cours mais je vous met quand meme la video 🙂
en fait on va essayer de mettre un maximum d’information sur le site pour que les gens s’en inspire!!
Le réglement peut etre vu ici .(pdf)
La video des finales des championnats de France sont ici. (Youtube)
Ce fut pas moins d’une 15ene de seances ( avec qques Samedi et Dimanche) pour monter tout ca !
A la manoeuvre… :
Fanny
L’architecture Robot / Telecommande
On fait simple…. 4 roues !! Au debut on est parti sur l’idée des roues mecanum (voir la photo) qui peuvent faire bouger le robot lateralement . Le seul inconvenient c’est que chaque moteur doit etre piloté individuellement. Voici une petite video sur les roues Mecanum ( 4min 30 )

Finalement on choisit des roues standards car les enfants ont peur de la gestion des cas « lateraux » et « diagonales »
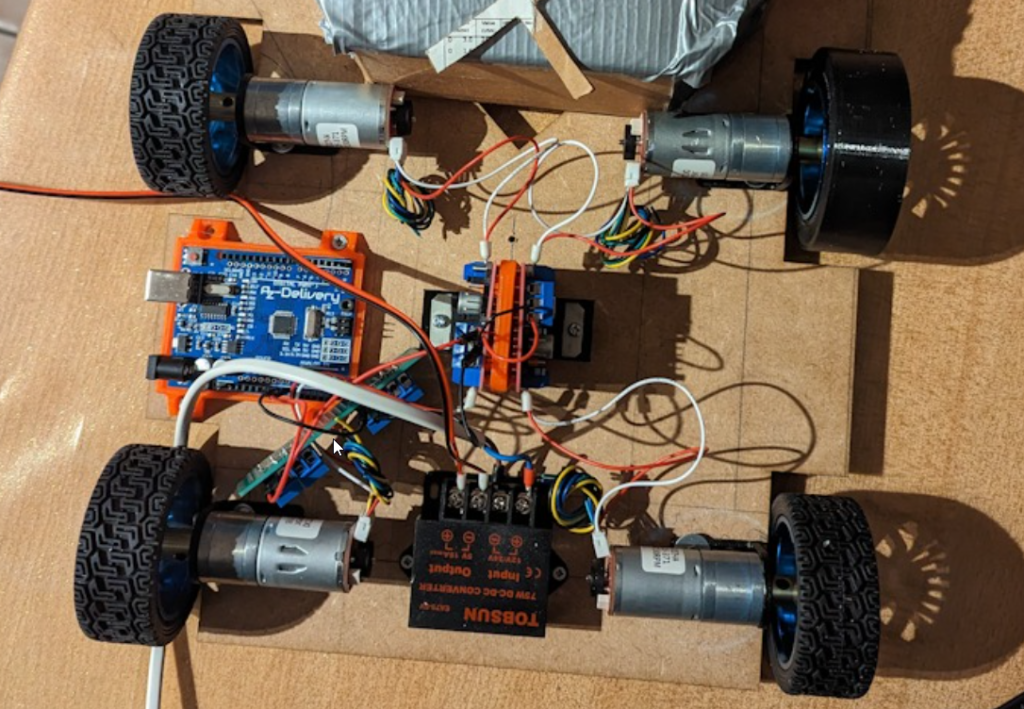
On choisit des moteurs 120tr/min avec réduction et codeurs ( les codeurs n’ont jamais étés utilisés).
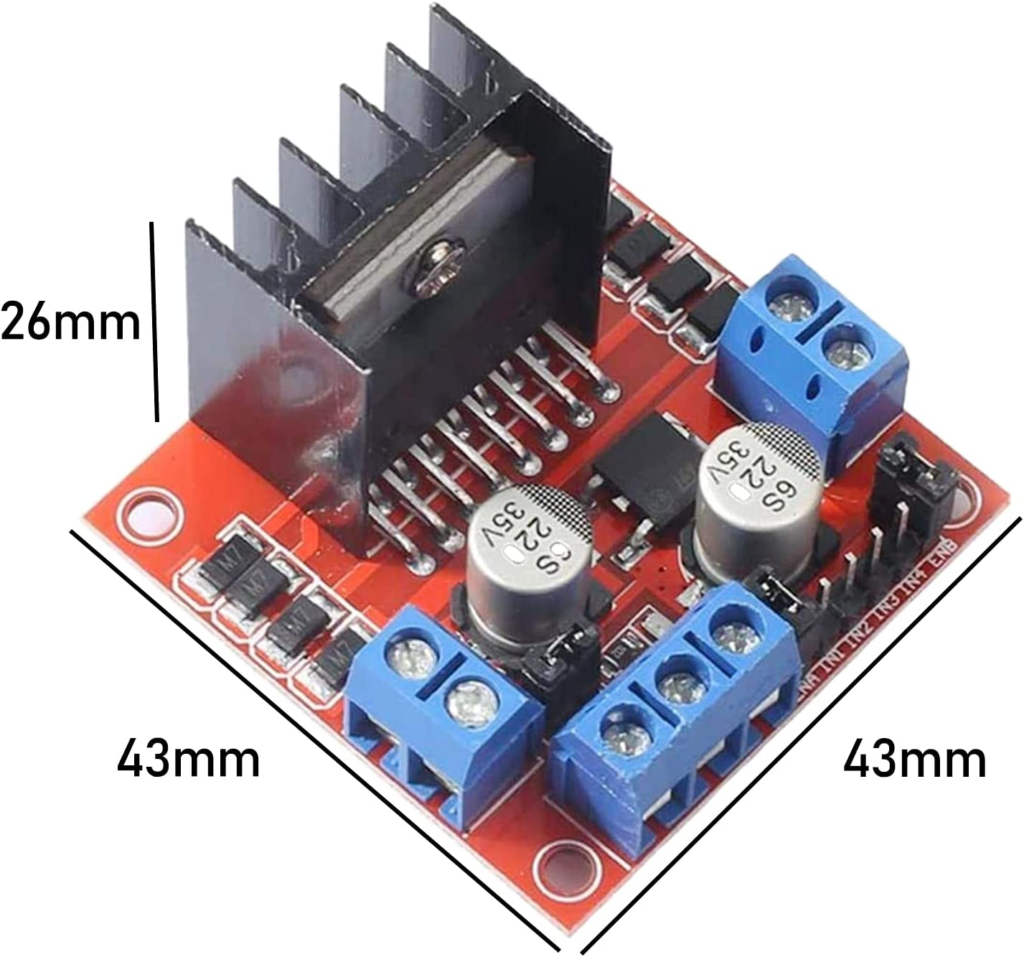
Ils sont pilotés par 2 modules LN298N . On pourrait faire avec 1 seul mais je gardais le secret espoir d utiliser les roues meccanum 🙂 (hehehehe)!

Pour piloter le robot , on utilise une carte Arduino UNO toute simple. Elle sera programmé au debut avec « scratch » , mais Fanny , curieuse ( ok je l’ai un peu poussé a essayer) passera sur le language C. On utilise l’outil de developement standard Arduino.
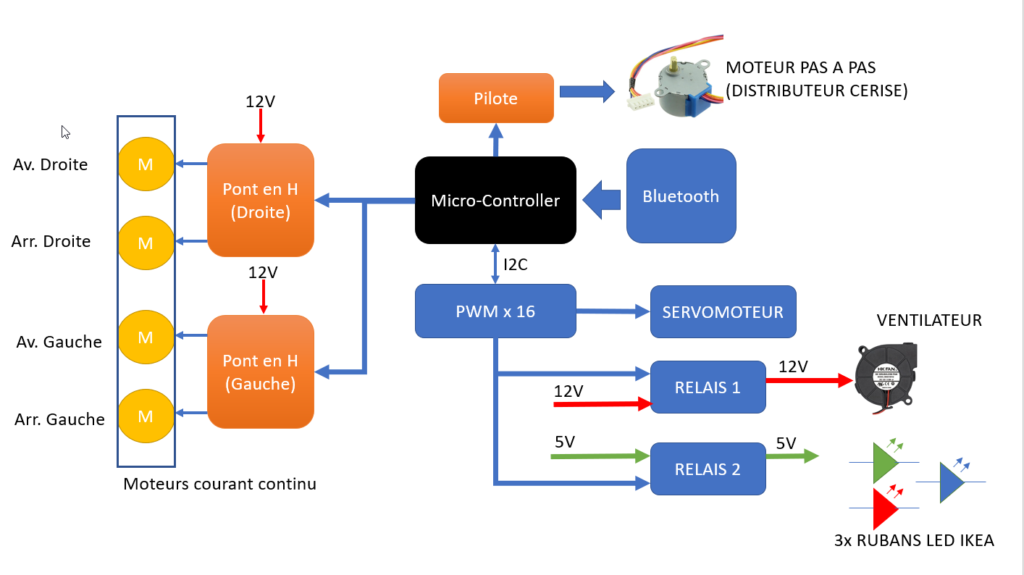
Le coté Gauche et le coté droit sont donc pilotés indépendamment ce qui permet de tourner le robot… mais les 2 moteurs Gauche ( Avant/arriére) sont pilotés ensemble et les droits pareil.
La commande vient de l’Arduino en 5V, et la partie « puissance » est cablée en 12V pour les moteurs.
Une fois le robot mobile ( yes….c’est toujours sympa de voir son travail bouger 🙂 ) on a essayé de voir comment mettre les balles sur les piles de gateaux.
On opte pour un tourniqué qui va venir delivrer les balles qui rouleront vers les gateaux.
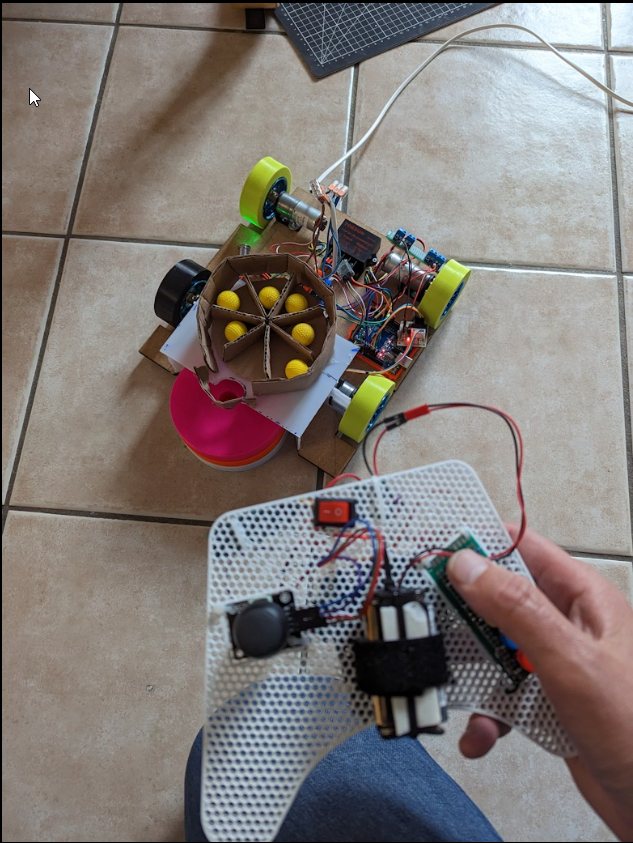
On a fait le prototype en carton.
Maintenant… comment vas t on recuperer les balles sur la table ???
On debut on voulait utiliser un aspirateur ….mais apres pas mal de temps dessus… on laisse tomber car les balles restent coincées pres de l’aspirateur. Bref…. on commence…. alors on se concentre sur l’essentiel.
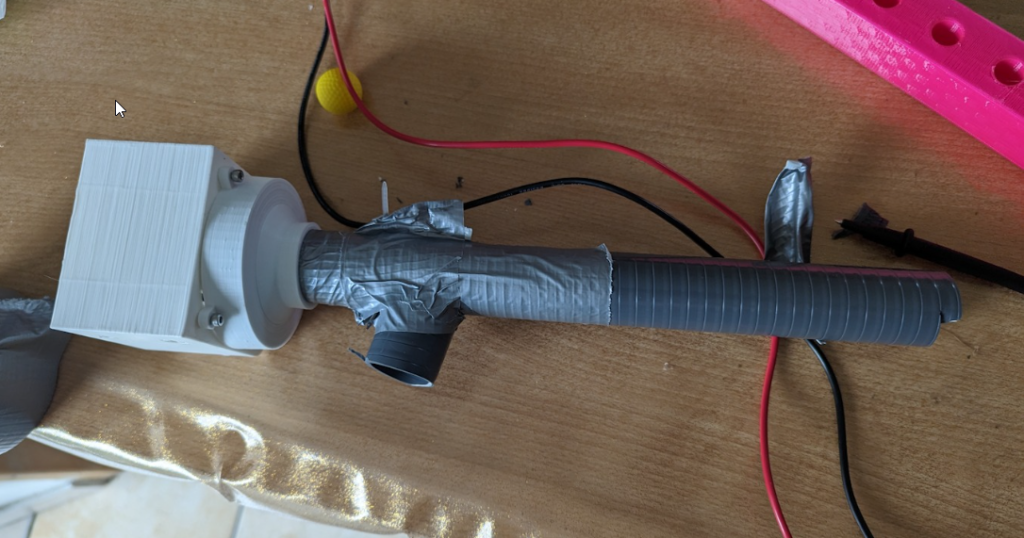
Du coup on choisit la solution d’un tube chargé de balles et celles ci seront poussées ….par…..(roulement de tambour)…. un ventilateur d’imprimante 3D ! Les balles etant tres legéres, le ventilateur 5015 12volts fait merveille!
Pour finir, on utilise des bande a LED ( Merci IKEA) que on « hacke » et on branche dessus le 5V via un relais ( toujours piloté par l’arduino).
Les relais des LEDs et du ventilateur sont pilotés par une carte I2C ( protocole de liasion série) qui a 16 sorties PWM réglables. On y pilote aussi les 2 servomoteurs pour ….les yeux de la licornes sinon ca ne serait pas cool!
La connexion en Bluetooth est assurée par un module HC05 qui est reglé specifiquement pour se connecter que a la telecommande ( un SSID special avec un mot de passe inviolable) :-)!!
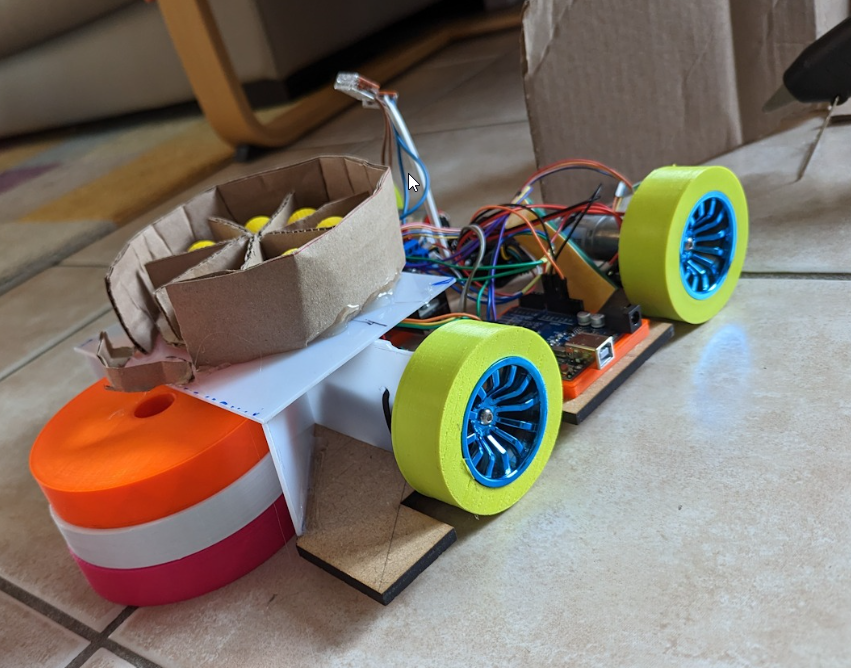
Le planché du robot est fait en MDF 6mm decoupé au laser par le Crealab ST. Les montants du robot sont en pin ( carrés de 14 mm de cotés) simple et efficace, facile a manipuler. Pour le renforcement des equerres d’alu sont utilisée.
Au Final notre robot fait 33cm de long sur 28cm de large et 34 cm de haut. …. mais il est tout vide ^-^
La telecommande
Element majeur du systeme, car sans elle , rien ne marche!
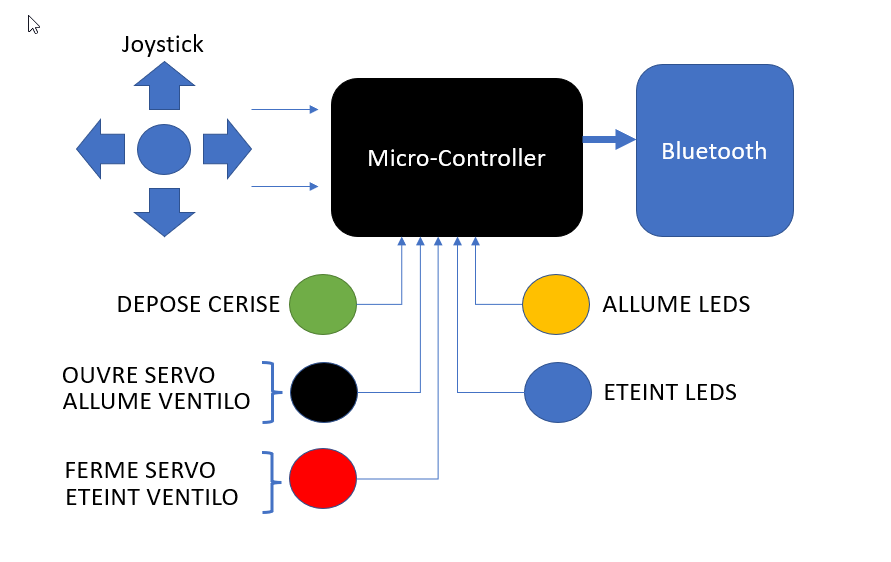
Une carte arduino, avec des boutons poussoirs controlent les actionneurs. Le mouvement est lui geré par un joystick ( que Fanny a vu en classe..cool ca va plus vite) branché sur les broches analogiques de l’arduino. La vitesse du robot est donné par l’inclinaison du Joystick.
La liaison serie est assurée par un HC05 !
Pour les batteries….ben des piles AAA 🙂 restons simple!
L’année prochaine on partira sur encore mieux …telecommandes PS3 🙂
Le panier
Le panier a pour but de nous faire gagner des points. Les robots viennent déposer les balles de Nerf dans le panier qui doit les compter. Au début on penchait pour une simple toboggan avec comptage visuel ( des marques visuelles sur le plexiglass)
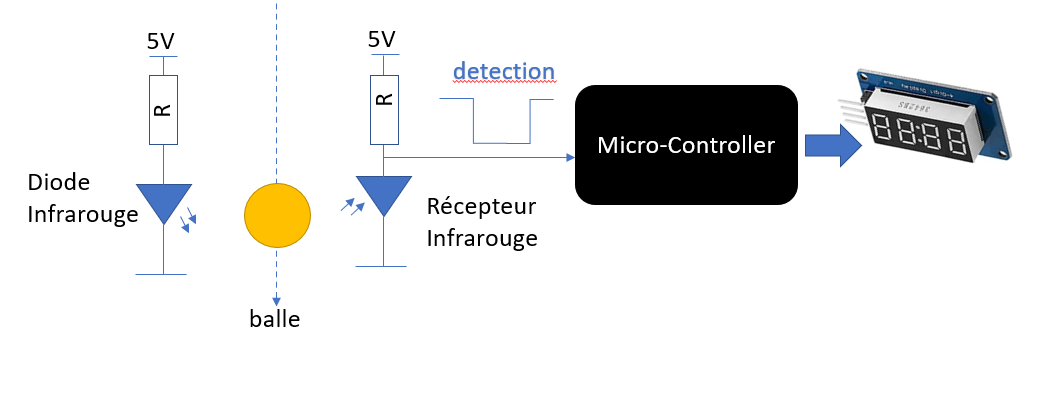
Finalement on choisit d’utiliser une version électronique de comptage. un tube pvc dans lequel les balles tombent…et sont comptées car elles coupent un faisceau infrarouge.
Pour cela on utilise encore une carte Arduino et des capteurs ( diodes achetées sur Amazon.)

Le compteur est affiché sur un afficheur TM1637
Code Arduino